宇树 G1 人形机器人再进化:能爬桌子、搬凳子,美国团队新成果
美国亚马逊 FAR、麻省理工、加州大学伯克利分校、斯坦福大学和卡内基梅隆大学等高校团队本周公布了一项名为 OmniRetarget 的最新研究成果。这是一个基于交互网格的交互保留数据生成引擎,能够生成运动学上可行的轨迹。

研究团队展示了一段视频,其中宇树 G1 人形机器人完成了一系列复杂且长时间的动态动作,这些动作完全由本体感觉策略驱动,无需依赖视觉或激光雷达。在其中一个任务中,宇树 G1 机器人携带一把椅子到桌子旁,将其作为踏板爬上去,然后跳下并执行类似跑酷的翻滚动作来缓冲落地。
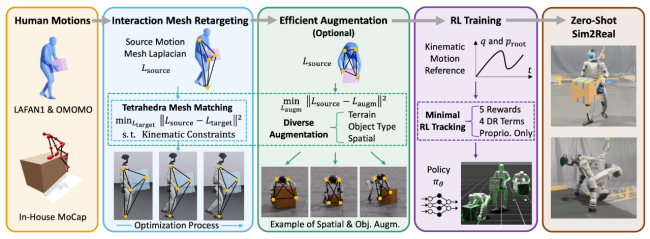
OmniRetarget 明确建模并保留了智能体、地形和被操作物体之间关键的空间和接触关系。通过最小化人类和机器人网格之间的拉普拉斯变形,并强制执行运动学约束,该引擎生成了运动学上可行的轨迹。研究团队从多个数据集中重新目标追踪运动,全面评估了 OmniRetarget,生成了超过 9 小时的轨迹,这些轨迹在运动学约束满足和接触保持方面优于广泛使用的基线。这种数据使本体感觉强化学习策略能够在宇树 G1 人形机器人上成功执行长达 30 秒的跑酷和运动操作技能,仅使用 5 个奖励项和所有任务共享的简单领域随机化进行训练,没有任何学习课程。
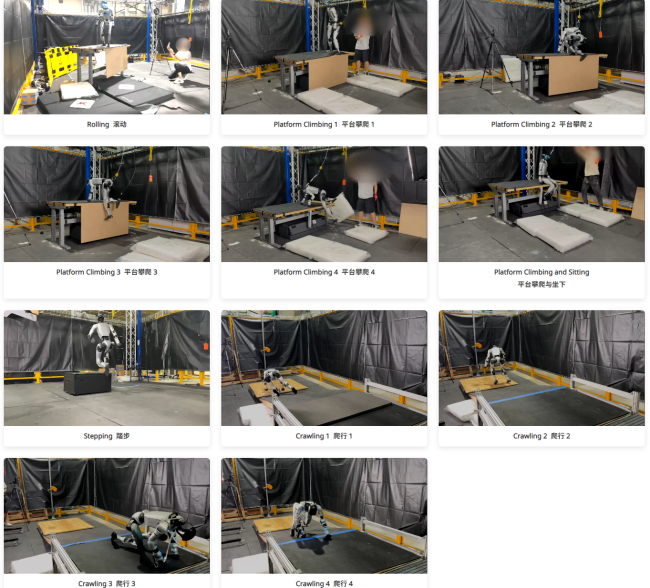
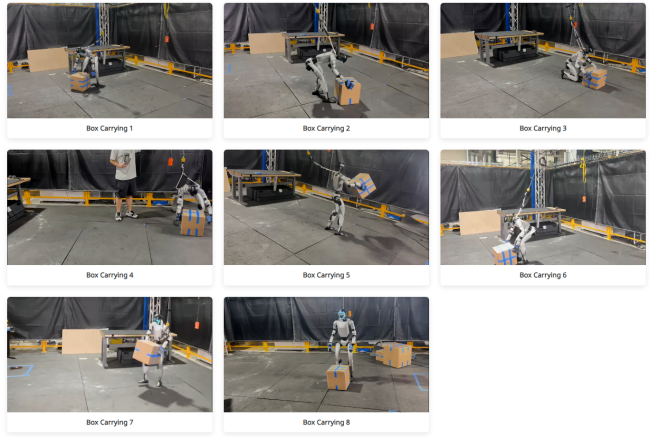
研究团队还展示了多个演示案例,包括翻滚、爬桌子、跳上小箱子和爬行等。此外,OmniRetarget 能够让人形机器人以多种风格进行运动操作,比如 8 种搬箱子的动作。
该研究的论文和数据集已经公开,代码将在后续发布。更多详细信息可以在研究页面找到。
热点推送
-

当MAXHUB做生态、华为做安全,Newline做对了什么?
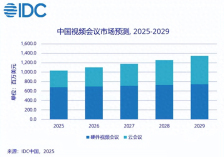
中国云会议市场正在经历一场微妙的预期重构。IDC曾预测2024年市场规模突破百亿,而终局数据定格在70.2亿元。
2026-06-16当MAXHUB做生态、华为做安全,Newline做对了什么? -
RIBA公布2026年度国际卓越奖,洛克·外滩源成为全球34个获奖项目之一
伦敦,2026年6月11日——英国皇家建筑师学会(Royal Institute of British Architects
2026-06-15RIBA公布2026年度国际卓越奖,洛克·外滩源成为全球34个获奖项目之一 -
14年开源深耕,调问DWSurvey打造适配中国企业的专属调研平台
在数字化运营常态化的当下,问卷调查早已成为企业市场拓析、员工管理、产品迭代、客户运维的刚需工具。
2026-06-1014年开源深耕,调问DWSurvey打造适配中国企业的专属调研平台 -
Soul App创始人团队披露Q1生态治理成果,技术与机制协同守护社交空间
Soul App创始人团队发布Q1生态安全报告,以多维治理筑牢社区安全防线近日,Soul App创始人团队发布《2026年第一季度生态安全报告》
2026-05-28Soul App创始人团队披露Q1生态治理成果,技术与机制协同守护社交空间 -
专访Soul创始人张璐团队:以AI技术温度重构年轻人真实连接
东方财经对话Soul创始人张璐团队,探寻AI社交的温度成立于2015年的Soul App,在创始人张璐团队的带领下,已走过近十年发展历程。
2026-05-11专访Soul创始人张璐团队:以AI技术温度重构年轻人真实连接 -
大电池党狂喜:消息称 OPPO 万级大电池新机已在路上,将率先在中端产品落地
博主 @数码闲聊站透露,OPPO 正在开发电池容量约为 10000mAh 的手机,并计划先在中端产品上推出。这意味着大电池将成为更多手机厂商的选择
2026-05-06OPPO,万级大电池 -
“哥布林”词频暴涨 175%,OpenAI 复盘称 AI 训练奖励机制意外“跑偏”
4月29日,OpenAI发布博文,复盘发现GPT-5.1系列及后续AI模型出现异常行为,在回答中频繁使用“哥布林”和“小魔怪”等生物隐喻
2026-05-06ChatGPT,AI,OpenAI -
希捷酷玩 FireCuda X Vault 外置游戏硬盘 20TB 款上市,5799 元
希捷近日推出了酷玩 FireCuda X Vault 外置游戏硬盘。这款硬盘的20TB大容量版本已在电商平台上架,售价为5799元
2026-05-06希捷,机械硬盘 -
零跑 D19 旗舰 SUV 上市 15 天大定突破 1.5 万辆,A10 首月突破 4 万辆
零跑汽车宣布,零跑D19上市15天内大定订单突破1.5万辆。另外,零跑A10在上市首月大定订单也超过了4万辆。 在北京车展期间,零跑汽车创始人、董事长兼CEO朱江明透露,零跑A10和D19的订单表现远超预期
2026-05-06零跑,D19,零跑 -
IT之家评测室首发支持 NVIDIA DLSS 4.5,二次元“步行模拟器”《异环》体验如何?
4月23日,超自然都市开放世界RPG游戏《异环》(Neverness to Everness)正式开启公测
2026-05-06NVIDIA,DLSS,4.5 -
快手推出 AI 桌面智能体 KroWork,支持通过自然语言生成本地应用
4月30日,快手推出了一款名为KroWork的AI桌面智能体产品。这款产品面向非技术用户,通过自然语言即可驱动AI自主完成文件处理、浏览器自动化、应用生成和本地部署
2026-05-06KroWork,快手,AI -
2027 款宝马 i7 M70 发布:换装新电池,WLTP 工况续航大幅提升至 686 公里
2027款宝马i7 M70车型已发布,外观与内饰调整大致与M760e车型保持一致,但仍有几处亮点。宝马将双电机动力系统调校至500千瓦,即670马力,较现款提升20马力。实际驾驶中,这一动力差距几乎难以察觉
2026-05-06i7,M70,宝马 -
智己汽车 4 月销量 10016 辆,1-4 月同比大涨 130%
智己汽车今日宣布,2026年4月销量达到10016辆,1-4月累计销量同比增长130%。旗下全新中大型增程SUV智己LS8于4月16日正式上市,五座版本售价为24.98万元起,六座版本售价为26.98万元起
2026-05-06智己汽车 -
雷神推出“ZQ27F540E”26.5 英寸显示器:2K 540Hz/720P 720Hz 双模,5499 元
雷神在京东上架了一款型号为“ZQ27F540E”的26.5英寸显示器,主打2K 540Hz和720P 720Hz双模显示,定价为5499元,部分地区国补后到手价低至4949元
2026-05-06雷神,显示器 -
T-Mobile 扩展卫星网络服务,身处移动信号盲区也能刷 X、聊 WhatsApp
10月3日,T-Mobile宣布其卫星到手机网络现已支持WhatsApp、Google Maps和X等主流应用,进一步增强了在移动信号盲区和偏远地区的网络连接能力
2026-05-06tmobile,X,WhatsApp -
LG 电子印度子公司将 10 月 7 日启动 IPO,最多募集 1160 亿卢比
根据LG电子印度子公司提交的最终版招股说明书,该公司的南亚次大陆分支部门计划于10月7日启动首次公开募股(IPO),出售15%的股权
2026-05-06LG电子,印度 -
网红挑战用特斯拉 FSD 自驾横跨美国,但只跑了 93km 就发生车祸
YouTuber @BeardedTesla 和 JoshWest247 在 9 月底进行了一次特斯拉 FSD 挑战,尝试让 FSD v13.2.9 自动驾驶 Model Y,从加州圣地亚哥开到佛州杰克逊维尔,全程 2362 英里
2026-05-06特斯拉,Model,Y -
晶圆级 AI 芯片企业 Cerebras 完成 11 亿美元 G 轮融资,投后估值达 81 亿美元
10月3日,晶圆级AI芯片企业Cerebras宣布完成超额认购的11亿美元G轮融资。此轮融资由Fidelity富达与Atreides Management领投,投后估值达到81亿美元
2026-05-06Cerebras,AI芯片 -
搭载 LGD 广色域高对比 Neo:LED 面板,惠普推出 514pn 便携显示器
惠普在当地时间昨日的发布活动上推出了新款HP Series 5 Pro 14"便携显示器514pn,这是世界首款拥有双百色域(100% DCI-P3 & 100% Adobe RGB)的商用便携屏
2026-05-06惠普,便携屏,便携显示器 -
中国移动发布灵犀机器人家族,人形产品 22.9 万元、四足机器狗 3.99 万元
第九届数字中国建设峰会于4月29日在福建福州开幕,主题为“移起向新,智有一套”,展示了数字中国建设的标志性成果。中国移动在峰会上发布了灵犀机器人家族,包括人形机器人和机器狗等多种形态
2026-05-05中国移动,灵犀机器人 -
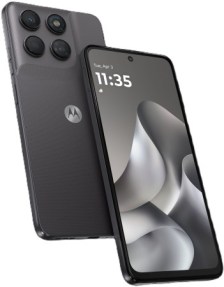
摩托罗拉 Moto G87 手机发布:2 亿像素主摄、IP69 防尘防水
摩托罗拉发布了Moto G87手机,这款机型配备了G系列手机史上规格最强的主摄。该机配备2亿像素主摄传感器,支持光学防抖(OIS),并具备2倍无损变焦功能。此外,还有一枚800万像素超广角镜头和3200万像素前置自拍镜头
2026-05-05Moto,G87,摩托罗拉 -
南航拟购 137 架空客 A320 NEO 系列飞机,目录价约 213.78 亿美元
中国南方航空及其控股子公司厦门航空于2026年4月29日分别与空客公司签署协议,购买102架和35架A320 NEO系列飞机
2026-05-05空客,A320,NEO -
HKC 推出“27Q500B”26.5 英寸显示器:2K 500Hz QD-OLED、原生 10-Bit 色彩,4999 元
HKC已在京东上架了一款型号为“27Q500B”的26.5英寸显示器,主打2K 500Hz,将于5月6日开启首销,定价4999元
2026-05-0527Q500B,HKC,QDOLED -
广汽丰田铂智品牌 4 月销量 14664 辆
广汽丰田宣布,铂智品牌4月销量为14664辆。其中,铂智3X月销创历史新高,达到10027辆,连续7个月蝉联合资新能源销冠;铂智7上市首月销量为4637辆
2026-05-05广汽丰田铂智 -
摩托罗拉 Moto G47 手机发布:配备天玑 6300 处理器、1.08 亿像素主摄
摩托罗拉发布了Moto G47手机,同时还推出了Moto G37、Moto G37 Power、Moto G87以及三款Razr 70系列折叠屏手机。 Moto G47搭载天玑6300处理器,配备8GB LPDDR4X内存
2026-05-05Moto,G47,摩托罗拉 -
机械师推出“MZF25F400”24.5 英寸显示器:1080P 420Hz,1399 元
机械师在京东上架了一款型号为“MZF25F400”的24.5英寸显示器,主打1080P 420Hz,定价为1399元
2026-05-05机械师,显示器,电竞显示器 -
谷歌云业务营收占比突破 18%,AI 驱动下公司迎来结构性拐点
自1998年成立以来,搜索一直是谷歌的核心业务。然而,当地时间本周三,这一格局开始发生变化。 在母公司Alphabet公布的第一季度财报中,云计算业务成为最大亮点,营收同比大涨63%,达到200亿美元
2026-05-05谷歌云,谷歌,Alphabet -
长安启源 4 月交付 32118 辆,AQ 系列同比增长 159% 再创新高
长安启源今日宣布,4 月共交付了 32118 辆汽车,其中 AQ 系列同比增长 159%,创下新高。此外,全新 Q05 车型单月交付量达到 16128 辆
2026-05-05长安启源 -
价值 599 元,特斯拉 Model Y L 专用交流外放电适配器免费送
特斯拉宣布Model Y L上线交流外供电功能,功率最高可达2200W。特斯拉官方商城已上架适用于Model Y L的交流外供电适配器,售价为599元。 部分Model Y L车主收到通知,可以免费获得该配件
2026-05-05特斯拉,Model,Y -
飞智推出黑武士 5 Pro 手柄:无线延迟 4ms,升级力切换杠杆扳机
飞智上周推出了游戏手柄控制器新品黑武士5 Pro。相较于2024年推出的上代黑武士4 Pro,新型号的扳机升级至力切换杠杆原理,无线模式全链路延迟缩减至4ms
2026-05-05手柄,飞智